
Introduction
Servo motors are the high-precision workhorses driving modern robotics, CNC machinery, and automated packaging systems. Selecting the proper size for a servo motor – meaning one with torque, speed, and inertia characteristics matched to the application’s needs – is critical for both technical performance and cost efficiency. An undersized motor may struggle to move a load or hold accuracy, while an oversized motor may waste energy and budget with little added benefit. In industries like robotics, CNC machine tools, and packaging lines, where reliability and efficiency directly impact productivity, right-sizing motors is not just an engineering detail but a strategic decision. This report explores why correct servo motor sizing matters, examining the technical implications and the lifetime cost savings, supported by real-world examples and data. The goal is to provide both engineers and business stakeholders a clear understanding of how motor sizing affects performance, energy use, maintenance, and overall equipment lifespan.
Technical Implications of Servo Motor Sizing
Proper motor sizing is crucial to achieve optimal performance in motion control systems. Both undersizing and oversizing a servo motor can introduce technical problems:
-
Undersized Motors: A servo that is too small for the application will struggle to deliver the required torque or speed. The immediate consequence is poor performance – the motor may not be able to move the load swiftly or accurately, or in extreme cases, fail to move the load at all Undersized servos often run at or beyond their capacity, leading to overheating and potential burnout of the motor windings. For example, an underspecified axis motor on a CNC machine might stall or lose steps when encountering heavy cutting forces, resulting in missed positions or faulty parts. Similarly in robotics, an underpowered joint motor could limit the robot’s payload or slow down its cycle times. In addition to performance shortfalls, an undersized motor pushed too hard will have a shortened lifespan and may trigger frequent downtime for replacements, negating any upfront savings.
-
Oversized Motors: It might seem safer to err on the side of a bigger motor, but oversizing can be just as problematic. An oversized servo will certainly have ample power to move the load, but it brings a host of downsides. Technically, an oversized motor often means the motor’s rotor inertia is much higher relative to the load. This inertia mismatch makes it harder to control the motion precisely – the system can suffer from overshoot, oscillations, or “ringing” because the motor is too powerful and inertial for the task. In fact, a high load-to-rotor inertia ratio (where the motor is too small) is known to cause control instability, but conversely a very low ratio (motor much larger than needed) can indicate the motor is bigger than necessary. Ideally, designers seek a motor whose rotor inertia closely matches the load inertia; a 1:1 ratio is often “perfect” for performance, and ratios up to about 5:1 or 6:1 (load:motor) are usually acceptable in servo systems. If the motor is much larger (i.e. inertia ratio far below 1:1), the excess inertia can actually degrade responsiveness and make tuning the servo drive more difficult. Indeed, servo motors that are either undersized or oversized have been observed to vibrate or exhibit stability issues in operation.
Furthermore, an oversized motor typically operates well below its rated load most of the time, which puts it in an inefficient operating zone. Motors (and their drives) tend to run most efficiently at a substantial fraction of their capacity. When lightly loaded – as happens with an over-capacity motor – efficiency drops and precision can suffer. One industry guideline notes that if a motor spends most of its time at 40% or less of its rated load, it’s a strong candidate for downsizing. This is because many motors show a sharp decline in efficiency once load falls below ~30% of rated capacity. The motor may consume nearly the same electricity to overcome internal losses, but delivers little useful work at such low loads, meaning wasted energy is converted to heat. This can even cause an oversized motor to run cool (under-utilized) but still waste electricity. In motion control terms, using an overpowered servo is akin to using a sledgehammer for fine adjustments – it’s clumsy and energy-inefficient for the precision required.
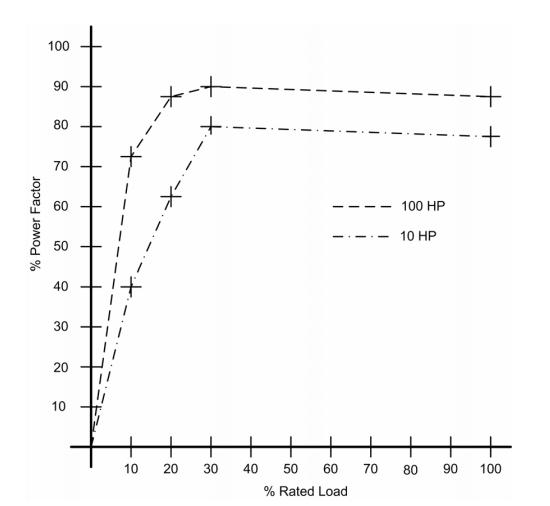
Figure: Example motor performance at partial loads. A large 100 HP motor (dashed line) and a smaller 10 HP motor (dash-dot line) both show a sharp drop in power factor/efficiency when operating below about 30% of their rated load. An oversized motor running at only 10–30% of its capacity will operate far from its optimal efficiency range. As a rule of thumb, motors consistently under ~40% load are likely oversized and could be replaced with a smaller unit for better efficiency. (Source: https://www.servo.net/why-servo-motor-sizing-is-important.html)
Another often overlooked issue with oversizing is the physical and mechanical impact on the system. Larger motors are of course heavier and bulkier, which can be a significant drawback in space-constrained designs. In a robotic arm, for instance, a heavier motor adds load to the joints further down the kinematic chain. This extra weight must be carried and accelerated by other motors, potentially forcing those to be larger as well – a compounding effect. In the case of CNC machines or packaging equipment, an oversized motor might not fit in the allotted space or may require a larger mounting framework. As one engineering source notes, an over-sized system “will control the load but will also be larger and heavier, as well as more expensive… It may not physically fit and it certainly will cost more”. Mechanical components like couplings, gearboxes, and bearings can also experience added stress if an oversized motor delivers more torque or force than the downstream parts were designed for. This can lead to premature wear in those components. In summary, while oversizing is commonly done with the intent to add a safety margin, it introduces inefficiencies and potential control difficulties that must be weighed against the benefits.
Inertia Matching and Dynamic Performance: Proper sizing also ties into the concept of inertia matching. In servo-driven systems (such as a robot axis or CNC feed drive), the motor must rapidly accelerate and decelerate not just the load but also its own rotor. If the motor’s rotor inertia is orders of magnitude larger than the load’s inertia (a symptom of an oversized motor), the system may become sluggish – the motor resists changing speed quickly, undermining the high responsiveness expected from a servo. On the other hand, if the load inertia dominates (undersized motor), the motor might struggle to control the motion, leading to overshoot or oscillation after moves. Engineers often target a load-to-motor inertia ratio around 1:1 for ideal servo performance. Ratios up to about 5:1 or 6:1 can still be tuned to run smoothly in many cases, but beyond that, the control loop may become unstable, risking oscillation and even total loss of position control. To manage inertia mismatches, designers sometimes introduce gearboxes or belt reductions, which allow a smaller motor to effectively move a large inertia load by trading speed for torque. This underscores that correct motor sizing is not just about torque ratings – it’s about the whole dynamic behavior of the system.
Avoiding Common Sizing Pitfalls: It’s worth noting why oversizing happens so frequently despite these issues. In practice, engineers may overspec a motor “to be safe” due to uncertain load calculations or to allow for possible future increases in load. There’s also the tendency to reuse motor sizes that worked on previous machines or to grab whatever is available in inventory, which often leads to using a bigger motor than necessary. While a modest safety factor is prudent, best practice is to perform informed calculations of the peak torques, RMS (continuous) torques, and speeds required, and then choose a motor that meets those requirements with a reasonable margin. For example, one common mistake is sizing a servo for the maximum instantaneous torque as if it needed to supply it continuously. In reality, many motion profiles (especially in CNC and robotics) involve short bursts of acceleration/deceleration. Servos are capable of delivering higher peak torques for short durations, so a motor can be selected based on its continuous torque for the majority of the cycle and its peak torque for the brief acceleration periods – instead of picking a much larger motor that could sustain that peak forever. Proper sizing thus requires a detailed understanding of the motion cycle and loads. When done correctly, the result is a motor that is “just right” – large enough to meet performance demands, but no larger. The technical payoff is smoother, more responsive motion control and a system that runs within its optimal performance envelope without excess vibration or stress.
To summarize the technical effects of sizing, the table below compares undersized, oversized, and correctly sized servo motors:
| Motor Sizing Scenario | Technical Impact | Operational/Cost Impact |
|---|---|---|
| Undersized (Motor too small for load) | • Insufficient torque or speed capability for the task • Risk of stalling, missed positions, or inability to reach required accelerations • Runs hot: prone to overheating, which can trigger faults or burnout • Poor control stability if load inertia greatly exceeds motor inertia (system can oscillate) |
• Downtime due to motor overload or failure (burned-out motors require replacement) • Higher maintenance needs and shorter motor lifespan • Potential productivity loss if machine must run slower to accommodate the weak motor (longer cycle times) |
| Oversized (Motor larger than needed) | • Motor operates at a small fraction of capacity → low efficiency zone (poor power factor, etc.) • Possible control tuning issues due to very low inertia ratio (motor may be “too stiff,” causing overshoot or vibration) • Heavier and bulkier component, which can stress mechanical structures or simply not fit in design • Tends to run cool, but mechanical oversizing can lead to under-loaded bearings or other components (not reaching ideal operating conditions) |
• Higher purchase cost upfront (larger servo motor and typically a larger drive/amplifier to power it) • Energy waste during operation – the motor draws power just to energize itself without doing useful work, especially at low loads • Can strain other components (e.g. gearboxes, couplings) if those aren’t scaled up, possibly shortening their lifespan • Consumes more physical space (in machines, or in control cabinets for bigger drives) |
| Properly Sized (Motor matches application needs with slight margin) | • Motor operates in its optimal performance range, providing needed torque and speed with good efficiency • Stable control – system can be tuned for smooth response without oscillation (load and motor inertia in balance) • Avoids thermal stress – motor runs at intended loading, reaching stable temperatures without frequent overheating • Right-sized motor often means other system elements (drive, frame, gearbox) are appropriately sized too, yielding a well-balanced design |
• Energy-efficient operation – motor runs at higher load fraction (closer to peak efficiency), reducing wastage • Lower total cost – typically a smaller motor and drive costs less to purchase and install, and uses less electricity over time • Less downtime – reduced risk of overload or component strain means fewer failures and maintenance interventions • Longer equipment lifespan – both the motor and mechanical parts see less undue stress, helping the system reach its design life with fewer repairs |
Lifetime Cost Considerations and Energy Efficiency
Beyond technical performance, motor sizing has a profound impact on the economics of a system. Business stakeholders often look for lifetime cost savings, and here the difference between a right-sized and a mis-sized motor can be dramatic. The costs associated with a motor over its life include the initial purchase, the energy it consumes, and maintenance or downtime costs. Among these, energy consumption is by far the dominant cost in long-running industrial equipment. One analysis estimates that for an electric motor, only about 2% of its total life cycle cost is the purchase price, and roughly another 2% is maintenance, while a whopping ~96% of the cost comes from the electricity to operate it. In other words, the energy used over years of operation vastly outweighs the upfront price tag of the motor.
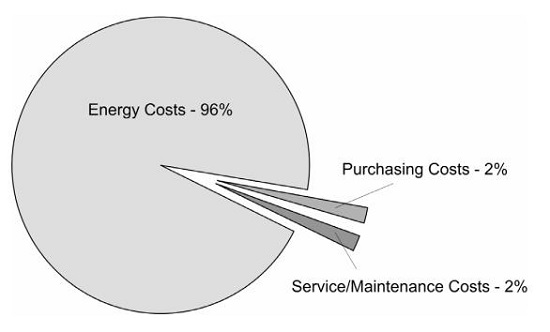
Figure: Typical life cycle cost breakdown of an industrial electric motor. Energy (operational electricity) costs constitute ~96% of total life cycle cost, whereas the initial purchasing cost and service/maintenance contribute only around 2% each. This illustrates that selecting the optimal motor size – and thereby minimizing energy waste – is crucial for long-term cost efficiency. (Source: https://www.servo.net/why-servo-motor-sizing-is-important.html)
Energy Efficiency and Motor Load: The link between motor sizing and energy efficiency lies in how motors perform under partial load. Electric motors (including servos) have an efficiency curve: they tend to reach peak efficiency at a certain load (often around 60–80% of rated load for many motors). If a motor is significantly oversized for the application, it will operate in a lower part of its load range most of the time (e.g. 10–30% loaded). In this region, the motor’s efficiency drops off. It draws power to energize its coils and overcome internal losses, but delivers comparatively little useful work. The excess energy is lost as heat or reactive power. As noted earlier, there is typically a steep drop in efficiency or power factor below about one-third load. Running a large servo motor at 10% of its capacity might yield very poor efficiency – meaning you’re paying for electricity that isn’t translating into mechanical output. Over years of 24/7 operation, this energy waste adds up to substantial costs. By contrast, a properly sized motor might run at, say, 70% load on average, where it operates much closer to its peak efficiency. The energy savings from this improvement in operating efficiency directly translate to lower utility bills for the company.
For example, consider a scenario in a packaging plant with dozens of servo motors. If many of those motors are oversized and each is operating at 20% load with an efficiency of, say, 50–60%, the wasted energy (and money) is significant. By downsizing motors to run at 60–70% load, efficiency might improve to ~85–90%, meaning a greater proportion of the electrical energy is converted to useful motion. The U.S. Department of Energy and industrial efficiency studies consistently find that eliminating motor oversizing is one of the key measures to reduce energy consumption in manufacturing facilities. One study of machine tools noted that oversizing of drives and auxiliary motors was the most common cause of poor energy efficiency, and that a needs-based, right-sized selection not only saves energy but also lowers the initial investment cost of those motors and drives.
It is also instructive to quantify potential savings. While the exact numbers depend on the duty cycle and electricity rates, even a modest reduction in motor power draw can save thousands of dollars over a motor’s lifetime. For instance, replacing a continuously running oversized motor (that might be inefficient) with a high-efficiency properly sized motor could save a significant percentage of energy. In one case study, downsizing an oversized motor in a pumping system and switching to a more efficient motor led to about a 27% reduction in power consumption for the same output work. Similar savings have been reported in various applications after “retrofit” projects where motors were right-sized for the actual load rather than the theoretical maximum. These energy savings are not only good for the bottom line but also reduce heat generation (lower cooling costs or heat-related wear) and support sustainability goals by lowering the facility’s carbon footprint.
Drive and Infrastructure Costs: Another cost aspect of servo sizing is the impact on the entire drive system and infrastructure. A larger servo motor typically requires a larger drive (amplifier) to deliver the necessary current and voltage. Drives are costly components, so oversizing the motor often forces oversizing of the drive electronics as well. Moreover, larger motors and drives might necessitate heavier-gauge wiring, bigger circuit protection devices, and larger control cabinets or enclosures. All of these add to the initial system cost. Conversely, using the smallest motor and drive that meet the requirements yields savings across these areas – smaller drives and components are cheaper and take up less space. As noted in one reference, finding the smallest motor that fulfills the torque and speed needs (“match the motor’s torque to the load as close as possible”) generally means lower power consumption and smaller, less expensive supporting hardware to run that motor. It’s a cascading benefit: a downsized motor not only costs less itself but also potentially cuts costs in the power electronics and physical structure.
Maintenance and Downtime Costs: Proper motor sizing also influences maintenance costs and the longevity of equipment. An undersized motor, as discussed, is prone to overheating and failure. Each time a motor overheats or burns out, you incur repair or replacement costs, and production may halt while the motor is serviced. These downtime costs can dwarf the price of the motor itself, especially in high-throughput operations (imagine an assembly robot or packaging line down for hours). Thus, avoiding undersizing is critical to maintain uptime. On the flip side, oversizing a motor can also have indirect maintenance costs. If an oversized motor is “loafing” (underloaded) most of the time, it might not fail itself, but as mentioned, it can cause wear in other components. For example, an oversized servo on a conveyor may shock the mechanical system with higher torque spikes, causing belts to wear or shafts to fatigue faster than they would with a appropriately sized motor. A survey of industry professionals found that while many used to oversize motors as a precaution, increasing knowledge of system requirements has enabled more precise sizing – and those who avoid oversizing report benefits like reduced energy use and longer equipment life for the whole system.
In some cases, oversizing was used as a band-aid for other issues – for example, using a bigger motor to compensate for lack of maintenance or suboptimal mechanics. This is a costly approach; a better-maintained or better-designed system could allow a smaller motor to do the job. One article noted that oversizing often “is easier to handle than the price of a mechanical mishap” in the minds of some engineers, but in reality, improving the mechanical system and maintenance can eliminate the need for an oversized motor. The extra cost and energy of the larger motor is not worth it if the underlying issues can be fixed. The most efficient scenario is to understand the true load profile and size the motor accordingly, rather than oversizing as a catch-all safety net. When motors are right-sized, they tend to run at their sweet spot, which means less heat, less vibration, and therefore less strain on bearings and insulation. This contributes to longer mean time between failures. Additionally, a properly loaded motor is more likely to stay within its thermal limits, so you avoid frequent thermal trips or the need for aggressive cooling measures.
In summary, from a cost perspective, right-sizing servo motors has multiple advantages: it minimizes energy waste (cutting operational expenses), reduces the need to overspend on drives and infrastructure, and helps avoid the hidden costs of downtime and premature wear. The lifetime total cost of ownership (TCO) for a motion system will be lowest when each motor is just powerful enough for its task and no more. This principle of “lowest cost for best performance” drives the motor sizing process in savvy engineering organizations. Proper sizing is a one-time engineering effort that pays dividends for years in the form of energy savings and reliable production.
Industry Examples and Case Studies
The importance of servo motor sizing becomes very tangible when looking at specific industries. Below we highlight how proper or improper motor sizing impacts robotics, CNC machinery, and packaging systems – three areas where servos are widely used.
Robotics: Precision, Payload, and Energy in Balance
In industrial robotics, servo motors actuate each joint of a robotic arm or drive axes of robotic systems. These applications demand both high precision and efficient use of power, especially as robots often operate continuously in manufacturing settings. Proper motor sizing in robotics is crucial for maintaining performance while avoiding unnecessary weight and energy usage. Each joint’s motor must be sized to handle the loads (like the arm link and any payload) and the dynamic movements (accelerations during robot motion). If a motor is undersized in a robot arm, the robot might fail to lift the specified payload or move slower than its design speed. Such a robot would not meet its throughput targets or could even stall under heavy loads, leading to missed operations. Undersizing in robotics also affects precision – an underpowered motor may not achieve the fine positioning required for tasks like assembly or welding, especially under external forces.
On the other hand, using an oversized motor in a robot joint can actually reduce the robot’s overall efficiency and agility. Larger motors are heavier, and when placed on the robot (especially on upper arms or wrists), they increase the inertia the other joints must move. This creates a cascade: an oversized motor on the robot’s arm makes the whole arm heavier, so the base joint needs more torque (perhaps a bigger motor itself) to swing that arm rapidly. Thus, oversizing can lead to a heavier robot that requires more energy to accomplish the same movements. A recent review on industrial robot energy consumption highlighted that “Over-sized motors and heavy robot arms can waste energy and decrease efficiency of industrial robots”. In other words, every extra kilogram in the robot or extra watt of motor capacity that isn’t needed ends up as wasted energy. Robots are often designed with energy optimization in mind, because a typical high-payload robot can consume a large amount of electricity over its lifetime. One estimate is that a 210 kg payload industrial robot might use on the order of 60,000 kWh per year in intensive operation. Any inefficiency from oversizing will multiply that energy usage. Therefore, leading robot manufacturers carefully size motors and use lightweight materials to ensure the motors are not larger than necessary for the job.
From a performance standpoint, right-sized motors contribute to better robot motion quality. A correctly sized servo will allow the robot to follow its programmed trajectories with high fidelity, stopping precisely at target points without oscillation. If the motor is far too large, the control system may need to work harder to “tame” the motor’s response so it doesn’t overshoot – large motors have larger momentum, which can lead to overshoot if not perfectly tuned. This is one reason why inertia matching is so emphasized in robotics: a motor that is proportional to the load yields more natural, easily controlled movements. Some advanced robots even use motor sizing and gearing such that each joint’s reflected inertia (motor + gear inertia as seen at the joint) closely matches the inertia of the link it moves, achieving a balance that simplifies control.
In robotics, energy efficiency and thermal management are also critical. Oversized motors might run cooler individually, but the energy inefficiency can contribute to heat in the environment or require the robot’s control panel to dissipate more heat from drives working at low efficiency. Mobile robots (like autonomous guided vehicles or humanoid robots) have even stricter energy needs since they run on batteries – any oversizing there directly reduces battery life between charges. Thus, proper sizing is not only about immediate performance, but also about enabling longer operation on limited power reserves.
A real-world example can illustrate the impact: Consider a robotic pick-and-place system in a factory. Suppose the initial design used somewhat oversized servos on each axis “just to be safe”. The robot worked, but the motors were larger than needed and the robot’s arm was heavier. This meant the base had to move more mass and consumed more energy, and the extra weight limited the maximum speed at which the robot could safely operate without causing vibrations. If the engineers then re-evaluate and choose smaller, lighter motors that still meet the peak torque requirements (perhaps using a gearbox to amplify torque if needed), the robot’s arm weight could drop, improving dynamic response. The lighter arm can accelerate faster, so cycle time might improve. The energy draw per cycle drops as well, because the new motors operate nearer their efficient range and there’s less dead weight to move. This kind of optimization was echoed by robotics researchers who recommend “proper robot selection, energy-efficient motors and low-weight robot arms” as key strategies for improving performance and reducing costs. In sum, for robotics: right-sizing motors means the robot only expends energy necessary for the task, carries no unnecessary burden, and achieves its precision and speed targets reliably.
CNC Machinery: Accuracy, Throughput, and Efficiency
Computer Numerical Control (CNC) machines – such as machining centers, lathes, and mills – rely on servo motors to precisely control the position of axes and spindles. In CNC applications, accuracy and repeatability are paramount, and motors often run under both intermittent high loads (during rapid accelerations or cutting force spikes) and steady low loads (during finishing passes or dwell periods). Getting the servo motor sizing right in a CNC machine affects not only the machine’s cutting performance but also its energy consumption and tool wear.
If a CNC axis motor is undersized, the machine may suffer from positioning errors or inability to maintain feed rates. For instance, trying to cut a hard material at a fast feed with an undersized servo could result in the axis lagging behind commanded position (following error) or even stalling, ruining the part. Undersized spindle motors could bog down and lose RPM under heavy cutting, affecting surface finish and potentially damaging tools. These scenarios lead to scrap parts and unplanned downtime. Additionally, running near the limit, an undersized motor on a CNC will generate excess heat, possibly requiring frequent cool-down periods or causing the control to fault out to protect the motor. This clearly hampers productivity and can increase maintenance (as overheated motors need service).
On the flip side, oversizing of motors and drives in machine tools has historically been common, often as a conservative approach by designers to ensure machines can handle a wide range of cutting conditions. However, this practice has come under scrutiny as energy costs rise and efficiency becomes a selling point. Research in the machine tool industry has shown that oversizing of main drive units and auxiliary motors is a major cause of energy inefficiency in CNC equipment. Many CNC machines spend a significant portion of time in partial-load conditions – e.g. during non-cutting moves, or cutting softer materials than the machine’s maximum spec. If the axis and spindle servos are much larger than needed for the typical load, they operate inefficiently during those times. A study in a manufacturing setting found that auxiliary systems (like coolant pumps, hydraulic systems, even servo drives for tool changers) were often oversized based on worst-case thinking, resulting in low power factor and energy waste during normal operation. By re-dimensioning those motors to what is actually needed, the machines ran more efficiently and still met all performance requirements. Additionally, the study noted that a “needs-based dimensioning” leads to lower investment costs for the machine, since smaller motors and drives are cheaper and one avoids paying for unutilized capacity.
From an accuracy perspective, the proper sizing of servo motors in CNC is also tied to the machine’s ability to maintain tight tolerances. A motor that is too large (and thus perhaps too stiff) can sometimes induce vibration if the control loop isn’t perfectly tuned – this might show up as chatter marks on a milled surface if the system is on the verge of instability. Meanwhile, a correctly sized motor can be tuned to provide critically damped, smooth response. Modern CNC controls often include advanced auto-tuning and feedback algorithms that can compensate for some inertia mismatch, but they work best when the motor-load combination is reasonable to begin with. One case study in machine tooling found that optimizing the servo and drive selection improved the machine’s settling times (the time it takes for an axis to stabilize at position), which increased production throughput and saved on energy because the motors weren’t oscillating or hunting around the target position. In fact, a high-performance direct-drive servo upgrade in a certain machine yielded $15,000 annual savings due to faster settling (meaning the machine could run more parts in the same time) and energy efficiency gains, as reported in Control Engineering. This underscores how the right motor not only saves energy but can boost productivity – an improperly tuned or sized motor wastes time as well as energy.
Another aspect is duty cycle and thermal management in CNC. Machine tools often have cycles with intense motion followed by idle periods. If a motor is oversized, it might handle the intense part easily but during idle or low-load periods it’s just idling inefficiently. If a motor is properly sized, it might be working nearer its capacity during the intense moves (which is fine if within spec) and then getting a respite during lighter parts of the cycle – this actually can be ideal, as the motor’s inertia and magnets are being fully utilized and then have time to cool, etc. Manufacturers will specify an RMS torque rating for a servo (the effective continuous capability) and a peak torque for short bursts. Good sizing ensures the motion profile’s RMS torque is below the motor’s continuous rating (to avoid overheating), and the peak torque of the moves is below the motor’s peak rating (to avoid stall or demagnetization). Achieving this balance means the motor is neither too small (which would overheat under RMS load) nor excessively large (which would run far below RMS capability).
In practical terms, machine builders now leverage servo sizing software tools and application data to pick motors more intelligently for CNC systems. For example, if a new CNC router is being designed to cut composite material, the expected cutting forces can be estimated and the servo sized with a modest safety margin, rather than simply using the next size up “just in case.” This results in a machine that meets its specs with less overdesign. The payoff is lower power requirements (sometimes a smaller machine can even run on lower amperage supply or smaller breakers, which is an installation cost saving) and a smaller physical footprint for drives. Overall, proper servo sizing in CNC machinery directly affects the machine’s profitability: energy-efficient operation lowers running costs per part, and reliable, right-sized drives mean less downtime and more consistent quality. With energy efficiency becoming a marketing point for machine tools, many manufacturers now advertise features like regenerative drives and optimized motor sizing to assure buyers that the machines won’t be energy hogs when they’re not pushing full capacity.
Packaging Systems: Throughput, Reliability, and Cost Savings
The packaging industry extensively uses servo motors in automated machines – from bottle filling lines and cartoners to palletizers and form-fill-seal machines. In packaging, key drivers are high throughput (speed), precision (to avoid errors and waste), and reliability, since downtime can be extremely costly when per-minute production counts are high. Proper motor sizing in packaging equipment is fundamentally tied to all of these factors.
Many packaging machines have multiple axes of motion (for example, a case packer might have 10–20 servo axes performing coordinated tasks). If any of those motors is underpowered, it can create a bottleneck: the machine might have to run slower to accommodate the weaker axis, or risk jams and errors if run at full speed. For instance, if the servo pulling film in a form-fill-seal machine is undersized, it might not accelerate the film quickly enough, limiting the machine’s maximum packages per minute. Worse, an undersized motor might overheat after running at high speed for some time, requiring a cool-down or causing a fault that stops production. Such scenarios directly impact throughput and can also cause product defects (improperly sealed packages, mispositioned labels, etc., if the motor can’t maintain synchronization).
Oversizing motors in packaging machines, on the other hand, tends to happen when machine designers include generous safety margins or design one platform to handle a wide range of products (including potentially heavier future products). While this can ensure capability, it also means that for many applications the motors run below optimal load. Packaging machines often run continuously for long shifts, so the energy waste from oversized motors is a significant cost factor. One packaging machinery article noted that servo-based systems can “provide exactly the required power for each operation,” eliminating the energy waste that comes from oversized motors running unnecessarily. Unlike older mechanical systems that might run a motor constantly (even when a mechanism isn’t actively doing work), servo motors in modern machines typically only draw significant power when movement is needed, and they can even regenerate power during deceleration. This means a properly sized servo system in packaging is highly efficient: it matches power to demand. If the motor is too big, however, every time it moves a light load, it’s akin to using a high-horsepower engine for a small task – the motor’s own friction and losses consume power that a smaller motor wouldn’t.
A real-world case study illustrates the benefits of right sizing in packaging. Hamrick Manufacturing, a company building case packers (machines that pack products into cases), needed an automated solution with 17 servo axes in a very confined space. Because space was at a premium, they could not afford to use motors any larger than necessary. By choosing compact servo motors that were precisely sized to the torque and speed requirements of each axis, they achieved the needed power in the smallest form factor. The Controls Engineering Manager at Hamrick noted that the motors selected were “more than double” the performance he anticipated in that size, which allowed the machine to meet its specs without oversized motors. The outcome was a system that fit in the tight footprint and operated with high precision – it could “softly place each package” with gentle control for delicate labels. Importantly, he also observed that the accurate sizing of the motors contributed to smoother operation and reliability: “the motors run nicer and smoother… the sizing … was more accurate. Plus, they’re going to get a little more output because the motors are less likely to fail”. In essence, by not oversizing, each motor was doing its job efficiently and not causing any unexpected failures, which can happen if a motor is too small (overheating) or even if a motor is too large but causes other parts to wear out. The improved smoothness likely comes from better inertia matching and tuning of the system.
Another example can be drawn from a blister packaging machine context. Blister packagers often use servo motors for indexing the film, sealing, and punching operations. According to a packaging machinery blog, one advantage of servo drives is optimized power consumption: “on-demand operation: Servo motors only consume power when movement is required… precise power matching for each operation eliminates energy waste from oversized motors.”. In practical terms, if a machine only needs 1 kW of mechanical power for a brief seal operation, a properly sized servo will ramp up to provide that power and then idle at a low consumption state. An oversized motor might have a higher idle loss (perhaps its internal cooling fan is larger, or its windings draw more magnetizing current even when idle), thus using more energy even between operations. Over a day of production with thousands of cycles, the difference is substantial. Additionally, servo motors that are right-sized tend to generate less excess heat. Lower heat means less demand on cooling systems and often correlates with longer component life – heat is a major enemy of electronics and mechanical parts alike. In food and pharmaceutical packaging, reduced heat generation is not only an energy matter but also important for maintaining product quality (e.g. chocolate packaging machines try to minimize heat to avoid melting the product) and for worker comfort on the factory floor.
From a maintenance and lifespan perspective in packaging: If motors are oversized, they might rarely be stressed, but the system could suffer as described (inefficiencies, etc.). If motors are undersized, a packaging machine might frequently be down for motor replacements or require intense maintenance. Packaging lines are often highly integrated, so one station going down can stop the entire line (for example, if the label applicator motor fails, the whole bottling line stops). Thus, ensuring each motor is properly specified is key to the line’s overall OEE (Overall Equipment Effectiveness). Many companies have learned this the hard way through trial and error – an undersized component can cause chronic small stoppages that erode output. By investing time in proper servo sizing calculations (often with the help of the motor supplier’s engineering team), these issues can be prevented upfront.
In summary, for packaging systems the right-sizing of servo motors delivers: maximum throughput (each axis performing to its potential without being a weak link), energy savings (no oversized capacity drawing power needlessly), and high reliability (motors aren’t overstressed, and the machine runs cooler and more stably). All these translate into cost savings and better profitability for the packaging operation. It’s a clear example of how an engineering decision (motor sizing) resonates with business goals: a packaging line that runs faster, cheaper, and with fewer stoppages contributes directly to higher output and lower unit costs.
Conclusion
Proper servo motor sizing is a critical consideration that bridges both engineering performance and business cost efficiency. From robotics arms that must nimbly handle payloads, to CNC machines that demand precision and continuous operation, to packaging lines striving for high throughput, selecting the right size motor is key to success. Technically, a right-sized servo ensures smooth, controllable motion – avoiding the pitfalls of undersized motors (which overheat or fail under load) and oversized motors (which waste energy and can be difficult to control precisely). We saw that matching the motor to the load, particularly in terms of torque and inertia, yields better responsiveness and stability in motion control systems.
From a cost perspective, the implications are even more far-reaching. Proper motor sizing can dramatically lower the total cost of ownership of equipment by saving energy (often the largest cost over a machine’s life) and reducing the need for oversized hardware investments. Businesses benefit from lower electricity bills, and operators benefit from machines that run cooler and more reliably. There is also a sustainability angle – using only as much motor as needed means using energy resources more efficiently, aligning with green manufacturing principles.
Importantly, real-world cases underline these points: Oversizing motors has been identified in industry studies as a widespread cause of inefficiency and avoidable cost, while those who optimized motor sizes reported improved performance and savings. In robotics, eliminating excess motor mass and capacity leads to more agile robots and less energy draw. In CNC machining, careful motor selection improves both precision and power usage, sometimes yielding tens of thousands of dollars in annual savings through faster cycles and energy efficiency gains. In packaging systems, properly sized servos have enabled higher speeds and nearly eliminated unplanned downtime due to motor issues, all while trimming energy waste. These examples make it clear that servo sizing is not an academic exercise but a practical matter of competitive advantage.
For engineers, the takeaway is to invest the effort in rigorous motor sizing calculations and simulations during the design phase. Tools for motion profiling, inertia calculation, and thermal analysis are invaluable in this process. Rather than defaulting to a bigger motor “just in case,” one should quantify the requirements and choose a motor that meets them with a reasonable margin (often on the order of 10–20% as a safety factor). This approach ensures best performance at lowest cost. For business executives, the lesson is that supporting proper engineering diligence in motor sizing can pay off significantly over the life of the equipment. It might be tempting to overspec hardware to avoid short-term risk, but the long-term costs of that approach can be high. Conversely, underspending on too-small motors is a false economy if it leads to failures and lost production. The optimal approach balances these concerns – “the best performance for the lowest price,” which in motor selection means the smallest motor that reliably does the job.
In conclusion, proper servo motor sizing stands out as a win-win: technically it enables machines to run at their sweet spot of accuracy and responsiveness, and financially it reduces energy and maintenance expenditures. Whether it’s a robot flawlessly assembling electronics, a CNC machine cutting precisely to a micron, or a packaging line wrapping products at lightning speed, behind the scenes a correctly sized servo motor is often what makes it possible. It’s an area where smart engineering choices directly translate into operational excellence and cost savings, underscoring the importance of getting motor sizing “just right” in today’s high-performance industrial systems.
Sources:
-
Oertli, R. Why Servo Motor Sizing is Important? – Servo Magazine/FAQ, 2018. Highlights energy costs comprising ~96% of motor life-cycle cost, and the need to right-size for performance and savings.
servo.netservo.netservo.net -
Nidec Control Techniques Blog. Sizing a motor & drive system, May 2018. Emphasizes that both under-sizing and over-sizing harm performance (overshoot, ringing, or wasted cost/space) and advocates informed calculations with appropriate safety margins. acim.nidec.com
acim.nidec.com -
PanelShop.com (Nelson, J.). Motor Oversizing: Does it do more harm than good? (Blog, 2019). Notes that universally, oversized motors have higher operating costs and wasted energy; also can strain system components and reduce their lifespan.
info.panelshop.com
info.panelshop.com -
Research by Denkena et al. Energy efficient machine tools (CIRP Annals, 2020). Reports that oversizing of main and auxiliary drives is a common cause of poor energy efficiency in machine tools, and that right-sizing lowers energy use and initial costs.
researchgate.net
researchgate.net -
Mitsubishi Electric Automation Case Study – Hamrick Mfg (2022). Describes a 17-axis packaging machine where compact, properly sized servos enabled high performance in a small footprint, improving smoothness and reducing risk of failures.
us.mitsubishielectric.com
us.mitsubishielectric.com -
Richpacking (Guangzhou) Blog. Advantages of Blister Packaging Machine Using Servo Motors (2023). Explains how servo systems match power to demand, avoiding energy waste from oversized motors, and reduce heat generation for longer component life.
richpacking020.com
richpacking020.com -
Soori, M. et al. Optimization of energy consumption in industrial robots – A review (Cognitive Robotics, 2023). Notes that oversized motors and heavy robot arms waste energy and lower robotic efficiency, advocating for lightweight design and proper motor selection.
researchgate.net -
Advanced Motion Controls (AMC). How to Choose the Right Servo Motor: 15 Selection and Sizing Tips (Application Note). Discusses inertia matching benefits (lower inertia ratio improves responsiveness and accuracy) and cautions against simply using maximum torque for continuous rating.
drivesandcontrols.ca
acim.nidec.com.